Building a fully dexterous robotic hand dramatically increases mechanical and software complexity. Each added part can become another potential failure point. As humanoids edge closer to factory deployment, manufacturers are asking how much dexterity is actually necessary on the factory floor.
Getting the right balance is important. “It needs to be as simple as possible [but still] drive value, and having 27 degrees of freedom adds so much that can go wrong,” ABI Research Senior Robotics Analyst George Chowdhury said, referring to the kinematic model used for human hands.
Manufacturers are deploying humanoids to perform simple jobs because the technology is not yet capable of undertaking precise manufacturing tasks.
Different types of factory work require different levels of dexterity, meaning each task needs different degrees of freedom (DoF), the number of independent ways the hand can move. Achieving the necessary DoF lies in developing actuators that are smaller and durable enough to replicate a human hand.
Factory work requires a wide spectrum of dexterity. Some tasks have involved robots for nearly a century, with robotic arms or other automation able to pick-and-place pieces on the assembly line. More recent developments with sensors enable robotic arms to assemble complex components, weld, and inspect products, but the “hands” are still largely grippers and end effectors.
One of the industry’s primary challenges in moving beyond simple end-of-arm tooling is achieving a high DoF while maintaining control and durability. Tactile sensing and the computation required to coordinate dozens of small movements at once add another layer of difficulty.
For manufacturers looking to automate more precise tasks, the humanoid industry is still working to develop dexterous hands capable of working in factories.
“The barrier is production-grade reliability at scale,” Agility Robotics CTO Pras Velagapudi said. “The more dexterous the requirement, the harder it is to build a hand that’s robust, serviceable, and dependable enough for real factories – especially when you’re targeting high utilization and minimal downtime.”
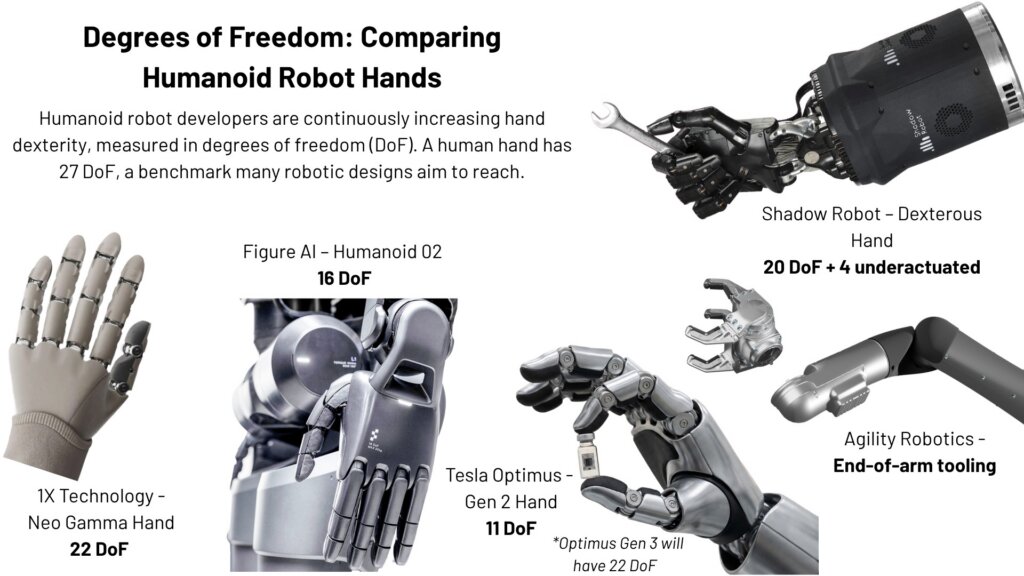
With plans to unveil their humanoid early 2026, Tesla is looking towards its third generation of Optimus to work in factories, the household, and in caregiving. It will have 22 DoF and 25 actuators in each hand, according to Elon Musk on X.
This is a huge jump from the 11 DoF in the previous generation. Musk believes the hand is the most difficult part of a humanoid.
“I haven’t seen any, even demo robots, that have a great hand, with all the degrees of freedom of a human hand,” Musk said on the Cheeky Pint podcast.
Tesla is not the only company working to improve dexterous hand capabilities for their humanoids. 1X Technologies’ latest humanoid hand has 22 DoF. Neo is designed for the home, but the company has other humanoid models geared towards factory use. Its fingers can move at 8 meters per second for precise activities that could be applied to manufacturing capabilities.
Figure AI’s most recent humanoid has hands with 16 DoF. The newest version includes tactile sensing to better control delicate tasks and improved torque control to perform tasks like removing bottle caps. They are now collaborating with BMW to integrate the robot into factories.
Because this level of actuation is so difficult, some humanoid companies, like Agility, chose not to wait for that technology to be ready and built their robots with simpler end effectors.
Agility’s humanoid, Digit, is outfitted with end-of-arm tooling, allowing technicians on the line to switch out tools depending on the task. Digit is not yet able to switch out its own hands. Dexterous hands matter most for fine manipulation tasks, which most high-volume material-handling work does not require, Velagapudi told Build Better.
“Customers are prioritizing load capacity and durability over anthropomorphic dexterity, and in deployments to date, a simpler gripper has been ideal,” Velagapudi said.
At the center of dexterous hand complexity is actuation. The actuators act as the robot’s muscles, enabling movement. The type of actuator depends on the robot, but the three main designs are hydraulic, electric, and pneumatic. Hydraulic employs liquid, electric uses an electric motor, and pneumatic converts compressed air into motion.
Each offers its own tradeoffs in size, power, and efficiency.
“We had to design custom actuators, basically custom design motors, gears, power electronics, controls, sensors,” Musk said on the Cheeky Pint Podcast. “Everything had to be designed from physics first principles.”
Tesla’s latest humanoid hand relocated actuators to the forearm to move the fingers with a tendon-driven system, which better enables grip and pressure, according to BotInfo.ai, a humanoid robotics news site. Although this is not a new approach, the design is geared for mass production with hundreds of pressure sensors in the fingers to better handle delicate manufacturing tasks.
Both Figure AI and 1X Technology also developed custom actuators for their humanoids.
Otherwise, there has been very little “radical change” in actuator technology in recent decades, leaving dexterous hands limited by a motor’s physics, the Director of Shadow Robot, Rich Walker, explained. Shadow Robot specializes in dexterous hands. One of their hands has 20 actuated DoF and four underactuated movements. The hands are particularly sensitive, making them primed for delicate manufacturing tasks.
“We need to think of a new way to build this robot, taking advantage of this actuator and that may not be the way we’ve thought about robots in the past,” Walker said.
Although engineers continue to improve robotic hand capabilities, most companies are choosing to address only simple factory tasks because actuators are the limiting factor for more complex tasks.
Complex manufacturing tasks often require sensing and adaptive control, including pushing, pulling, twisting, and bending with controlled force.
“These tasks should be automated because a human is not adding any great value by doing them,” Walker said. “We’re just doing them with a person because we don’t have another option.”

